Традиционное рулевое устройство судна состоит из пера руля и деталей, обеспечивающих его перекладку на требуемый угол поворота. К этим деталям относятся штурвал, штуртрос, ролики, румпель, баллер и перо руля (рис. 2.17. ).
Рис. 2.17.
Схема традиционного рулевого устройства:
1 - штурвал;
2 - штуртрос; 3 - направляющие ролики; 4 - румпель секторного типа; 5 - баллер;
6 - перо руля
Современное рулевое устройство состоит из руля, рулевой машинки, боудена и кронштейна крепления боудена (рис. 2.18. ).

Рис. 2.18. Схема современного рулевого устройства: 1 - рулевой редуктор; 2 - кронштейн крепления; 3 - рулевое колесо; 4 - рулевой боуден
Рули бывают пассивными (традиционные) и активными (подвесной лодочный мотор (далее - ПЛМ), поворотно-откидная колонка (далее - ПОК) или водомет). Рули (пассивные) бывают различных типов (рис. 2.19. ).

Рис. 2.19.
Типы пассивных рулей:
а - навесной на транце; б -
подвесной балансирный; в - полубалансирный
Перо руля закрепляется на баллере, служащем для поворота пера руля на задаваемые углы. Перо руля может состоять из одной плоской пластины (пластинчатый руль) или иметь полую обтекаемую форму. На верхнюю часть баллера насаживается румпель в виде рычага для управления.
Для чего необходимы балансирный и полубалансирный рули? Во время движения судна на перо руля, отклоненное от диаметральной плоскости, давит сила, возникающая от обтекания водой. Эта подъемная сила, направленная горизонтально, сосредотачивается в одной точке - точке приложения всех равнодействующих сил давления. Она располагается примерно на 1/3 от передней кромки пера руля. Таким образом, чем ближе к баллеру располагается точка приложения сил давления, тем меньшее усилие передается от пера руля через баллер и румпель на штуртрос и далее на штурвал.
Рули могут не иметь снизу точки опоры или опираться на «пятку». На водоизмещающих судах устанавливают подвесные полубалансирные и балансирные рули. Рулевое устройство состоит из штурвала, на валу которого закреплен барабан штуртроса, который проложен по роликам вдоль бортов катера к корме и крепится там к сектору, ПЛМ или ПОК. Штуртрос состоит из гибкого стального, иногда оцинкованного троса диаметром 3-6 мм. На барабан штурвала штуртрос навивается несколькими шлагами (витками) и контрится.
На роликах штуртрос обычно испытывает значительное трение, ввиду чего нужна постоянная смазка. Существенный недостаток штуртросной проводки: она быстро вытягивается, появляется «слабина». Это устраняется при помощи подтягивания талрепов. На мотолодках до 5 метров вместо талрепов иногда ставят натяжные пружины. Штуртрос проводится так, чтобы на переднем ходу вращение штурвального колеса в какую-либо сторону вызывало отклонение носовой части судна в ту же сторону. Натяжение и прокладка штуртроса должны быть такими, чтобы исключить его «набегание» на реборды роликов, а также его касание с конструкциями судна. Диаметр роликов по ручейку не должен быть меньше 15-18 диаметров троса. Штуртрос не должен препятствовать откидыванию ПЛМ и ПОК при дистанционном рулевом управлении ими. В настоящее время на новых моторных судах штуртросовая проводка применяется редко. На современных судах устанавливаются рулевые устройства с боуденами. Схема устройства боуденов и разновидности кронштейнов на рис. 2.20.

Рис. 2.20. Схема устройства боуденов
На рисунке показано принципиальное устройство боудена. В зависимости oт назначения, т. е. усилия и расстояния, на которое оно передается, конструкция боуденов может быть различной. Боудены существуют двух видов - рулевой и управления газом и реверсом. Те и другие также существуют трех типов: для небольших усилий на коротких расстояниях, средние и для наиболее нагруженных конструкций на удаленном расстоянии. Как правило, рулевые боудены поставляют длиной от 8 до 22 футов с интервалом в один фут.
Рулевые машинки (редукторы) также существуют двух видов - обычные системы и рулевые управления с функцией NFB, т. е. фиксируются в остановленном положении и без помощи штурвала в первоначальное положение руль не возвращается. Соответственно тот и другой вид машинки существует нескольких типов, в том числе способных работать в паре. Если посты управления в каюте и на палубе, можно установить машинки, работающие параллельно. Рулевую машинку, а, следовательно, и рулевое колесо (штурвал) не зависимо от наклона конструкции судна, к которой крепится рулевая машинка, можно установить под углом, удобным водителю. Боуден рулевого управления может крепиться на самом моторе (если есть детали крепления), на транце судна и стенке подмоторной ниши в зависимости от особенностей конструкции судна. В соответствии с этим выбирается конструкция рычага (тяги), которая поворачивает мотор (см. рис. 2.20.). Какой длины нужен рулевой боуден - см. рис. 2.21.

Рис. 2.21. Схема выбора длины боуденов
Еще одна деталь рулевого управления. Если на судно устанавливается два мотора, они должны быть соединены траверсой (специальной тягой) для синхронного поворота обеих моторов. Современные водоизмещающие суда и относительно большие глиссирующие суда (более 10 м) оборудуются подруливающим устройством. В носовой подводной части, поперек судна, располагается туннель (труба). Внутри туннеля, в диаметральной плоскости, расположен гребной винт, приводимый в движение электромотором, который при включении создаст тягу, направленную поперек корпуса судна в ту или другую сторону. В кормовой части подруливающее устройство чаще устанавливается на транец в виде отдельного агрегата чуть выше уровня днища судна.
§ 31. Рулевое устройство
Рулевое устройство служит для изменения направления движения судна, обеспечивая перекладку пера руля на некоторый угол в заданный промежуток времени.Основные элементы рулевого устройства показаны на рис. 54.
Руль - основной орган, обеспечивающий работу устройства. Он действует только на ходу судна и в большинстве случаев располагается в кормовой части. Обычно на судне один руль. Но иногда для упрощения конструкции руля (но не рулевого устройства, которое при этом усложняется) ставят несколько рулей, сумма площадей которых должна быть равной расчетной площади пера руля.
Основной элемент руля - перо. По форме поперечного сечения перо руля может быть: а) пластинчатым или плоским, б) обтекаемым или профилированным.
Преимущество профилированного пера руля в том, что сила давления на него превосходит (на 30% и более) давление на пластинчатый руль, что улучшает поворотливость судна. Отстояние центра давления такого руля от входящей (передней) кромки руля меньше, и момент, необходимый для поворота профилированного руля, также меньше, чем у пластинчатого руля. Следовательно, потребуется и менее мощная рулевая машина. Кроме того, профилированный (обтекаемый) руль улучшает работу винта и создает меньшее сопротивление движению судна.
Форма проекции пера руля на ДП зависит от формы кормового образования корпуса, а площадь - от длины и осадки судна (L и Т). У морских судов площадь пера руля выбирается в пределах 1,7-2,5% от погруженной части площади диаметральной плоскости судна. Ось баллера является осью вращения пера руля.
Баллер руля в кормовой подзор корпуса входит через гельм- портовую трубу. На верхней части баллера (голове) крепится на шпонке рычаг, называемый румпелем , служащий для передачи вращательного момента от привода через баллер на перо руля.
Рис. 54. Рулевое устройство. 1 - перо руля; 2 -баллер; 3 - румпель; 4 - рулевая машина с рулевым приводом; 5 -гельмпортовая труба; 6 - фланцевое соединение; 7 - ручной привод.
Судовые рули принято классифицировать по следующим признакам (рис. 55).
По способу крепления пера руля с корпусом судна различают рули:
А) простые - с опорой на нижнем торце руля или со многими опорами на рудерпосте;
Б) полуподвесные - с опорой на специальном кронштейне в одной промежуточной точке по высоте пера руля;
В) подвесные - висящие на баллере.
По положению оси вращения относительно пера руля различают рули:
А) пебалапсириые - с осью, размещенной у передней (входящей) кромки пера;
Б) полубалансирные - с осью, расположенной на некотором расстоянии от передней кромки руля, и отсутствием площади в верхней части пера руля, в нос от оси вращения;

Рис. 55. Классификация судовых рулей в зависимости от
способа крепления их с корпусом и расположения оси поворота: а - небалансирные; б- балансирные.
1 - простой; 2 - полуподвесной; 3 - подвесной.
в) балансирные - с осью, расположенной так же, как у полу- балансирного руля, но с площадью балансирной части пера на всю высоту руля.
Отношение площади балансирной (носовой) части ко всей площади руля называется коэффициентом компенсации, который у морских судов лежит в пределах 0,20-0,35, а у речных 0,10-0,25.
Рулевой привод представляет собой механизм, передающий на руль усилия, развиваемые в рулевых двигателях и машинах.
Рулевая машина на судах приводится в действие электрическими или электрогидравлическими двигателями. На судах длиною менее 60 м разрешается вместо машины установка ручных приводов. Мощность рулевой машины выбирается исходя из расчета перекладки руля на предельный угол до 35° с борта на борт за 30 сек.
Рулевой привод предназначается для передачи команд от штурмана из рулевой рубки к рулевой машине в румпельное отделение. Наибольшее применение находят электрическая или гидравлическая передачи. На малых судах применяются валиковые или тросовые приводы, в последнем случае этот привод называют - штуртросовым.

Рис. 56. Активный руль: а - с конической передачей на винт; б -
с электромотором водяного исполнения.
Контрольные приборы следят за положением рулей и исправным действием всего устройства.
Приборы управления передают приказания рулевому при управлении рулем вручную. Рулевое устройство - одно из самых важных устройств, обеспечивающих живучесть судна.
На случай аварии рулевое устройство имеет дублирующий пост управления рулем, состоящий из штурвала и ручного привода, расположенных в румпель- ном отделении или вблизи от него.
На малых ходах судна рулевые устройства становятся недостаточно эффективными и порой делают судно совершенно неуправляемым.
Для повышения маневренности на современных судах некоторых типов (промысловых, буксирах, пассажирских и специальных судах и кораблях) устанавливают активные рули, поворотные насадки, подруливающие устройства или крыльчатые движители. Эти устройства позволяют судам самостоятельно выполнять сложные маневры в открытом море, а также проходить без вспомогательных буксиров узкости, входить на акваторию рейда и гавани и подходить к причалам, разворачиваться и отходить от них, экономя на этом время и средства.
Активный руль (рис. 56) представляет собой перо обтекаемого руля, на задней кромке которого установлена насадка с гребным винтом, приводящимся в движение от валиковой кони- ческой передачи, проходящей через пустотелый баллер и вращающийся от электродвигателя, установленного на голове баллера. Существует тип активного руля с вращением винта от электродвигателя водяного исполнения (работающего в воде) вмонтированного в перо руля.
При перекладке активного руля на борт работающий в нем винт создает упор, разворачивающий корму относительно оси поворота судна. При работе гребного винта активного руля на ходу судна скорость судна увеличивается на 2-3 узла. При остановленных главных двигателях от работы гребного винта активного руля судну сообщается малый ход до 5 узл.
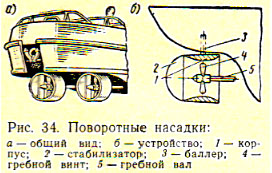
Поворотная насадка , установленная вместо руля, при перекладке на борт отклоняет отбрасываемую гребным винтом струю воды, реакция которой вызывает разворот кормовой оконечности судна. Поворотные насадки преимущественно находят применение на речных судах.
Подруливающие устройства выполняются обычно в виде туннелей, проходящих через корпус, в плоскости шпангоутов, в кормовой и носовой оконечностях судна. В туннелях размещается гребной винт, крыльчатый или водометный движитель, создающие струи воды, реакции которых, направленные от противоположных бортов, разворачивают судно. При работе кормового и носового устройства на один борт судно перемещается лагом (перпендикулярно диаметральной плоскости судна), что очень удобно при подходе или отходе судна от стенки.
Крыльчатые движители, установленные в оконечностях корпуса также увеличивают маневренность судна.
Рулевое устройство подводной лодки обеспечивает более разнообразные ее маневренные качества. Устройство предназначается для обеспечения управляемости подводных лодок в горизонтальной и вертикальной плоскостях.
Управление подводной лодкой в горизонтальной плоскости обеспечивает плавание лодки по заданному курсу и осуществляется вертикальным и рулями , площадь которых несколько больше площади рулей надводных судов и определяется в пределах 2-3% от площади погруженной части диаметральной плоскости лодки.
Управление подводной лодкой в вертикальной плоскости на заданной глубине обеспечивается при помощи горизонтальных рулей.
Рулевое устройство горизонтальных рулей состоит из двух пар рулей с их приводами и передачами. Рули делаются парными, т. е. на одном горизонтальном баллере располагаются по бортам лодки два одинаковых пера руля. Горизонтальные рули бывают кормовыми и носовыми в зависимости от места расположения по длине лодки. Площадь кормовых горизонтальных рулей больше площади носовых рулей в 1,2-1,6 раза. Благодаря этому эффективность кормовых горизонтальных рулей в 2-3 раза выше эффективности носовых. Для увеличения момента, создаваемого кормовыми горизонтальными рулями, их обычно располагают за винтами.
Носовые горизонтальные рули на современных подводных лодках являются вспомогательными, их делают заваливающимися и устанавливают в носовой надстройке выше ватерлинии, чтобы не создавать дополнительного сопротивления и не мешать управлению лодкой при помощи кормовых горизонтальных рулей на больших скоростях подводного хода.
Обычно на полной и средней скорости подводного хода управление подводной лодкой производится при помощи одних кормовых горизонтальных рулей.
При малой скорости хода управление лодкой кормовыми горизонтальными рулями становится невозможным. Скорость, при которой лодка теряет управляемость, называется инверсивной скоростью . На этой скорости лодка должна управляться одновременно кормовыми и носовыми горизонтальными рулями.
Основные составные элементы рулевого устройства горизонтальных рулей и вертикальных рулей однотипны.
Рулевое устройство является основным средством, обеспечивающим надежное управление судном при любых условиях плавания. Его конструкция должна удовлетворять требованиям Речного Регистра, предъявляемым к судну данного типа. Оно состоит из руля, рулевого привода, рулевой машинки, аксиометра, а иногда и рулевого указателя. В настоящее время на судах находят применение поворотные насадки, активные рули и подруливающие устройства.
Рули в зависимости от формы и расположения пера по отношению к оси вращения подразделяются на простые, балансирные и полубалансирные (рис. 33).
Простым называется руль, у которого перо расположено по одну сторону оси вращения (баллера). По форме профиля в плане простые рули могут быть плоскими (пластинчатыми) и обтекаемыми. Балансирным называется руль, у которого перо расположено по обе стороны баллера. Передняя по отношению к баллеру часть пера называется балансирной частью. В зависимости от конструкции кормовой части судна балансирные рули могут иметь нижнюю опору крепления или быть подвесными. Подвесной балансирный руль крепится на палубе или в корпусе судна (ахтерпике) на специальном фундаменте.
 Полубалансирный отличается от балансирного руля тем, что его балансирная часть меньше по высоте, чем все перо руля, и расположена только в нижней части.
Полубалансирный отличается от балансирного руля тем, что его балансирная часть меньше по высоте, чем все перо руля, и расположена только в нижней части.
Для обеспечения управляемости на заднем ходу толкачи оборудуются рулями заднего хода (так называемыми фланкирующими), которые устанавливаются впереди гребных винтов с таким расчетом, чтобы поток воды, возникающий при работе винтов на задний ход, был направлен на эти рули.
Поворотная насадка (рис. 34) представляет собой металлический цилиндр, внутри которого находится гребной винт судна. Своей верхней частью цилиндр крепится к баллеру, при помощи которого его можно поворачивать относительно гребного винта.
 У выходного отверстия насадки, для большей эффективности ее действия на управляемость судна, укреплен пластинчатый руль, который часто называют стабилизатором. С этой же целью в дополнение к стабилизатору иногда насадки оборудуются радиальными ребрами жесткости и шайбами.
У выходного отверстия насадки, для большей эффективности ее действия на управляемость судна, укреплен пластинчатый руль, который часто называют стабилизатором. С этой же целью в дополнение к стабилизатору иногда насадки оборудуются радиальными ребрами жесткости и шайбами.
Подруливающее устройство представляет собой трубу, установленную поперек корпуса судна, через которую с борта на борт прокачивается забортная вода с помощью центробежного насоса или винта. В первом случае подруливающее устройство называют насосным, а во втором-туннельным. Выходные отверстия в бортах имеют профилированную наделку и решетки для защиты трубы (туннеля) от попадания посторонних предметов. Принцип действия устройства заключается в том, что при перекачке (прогонке) воды с одного борта на другой вследствие реакции выбрасываемой струи создается упор, перпендикулярный диаметральной плоскости судна, что способствует перемещению судна вправо или влево. При изменении направления выброса струи будет изменяться и направление перемещения судна.
 Рулевые приводы служат для передачи усилий от рулевой машины на баллер руля. Наибольшее распространение получили приводы секторного типа с гибкой или жесткой передачей.
Рулевые приводы служат для передачи усилий от рулевой машины на баллер руля. Наибольшее распространение получили приводы секторного типа с гибкой или жесткой передачей.
.jpg) Рис. 37. Схема электрогидравлического рулевого устройства
Рис. 37. Схема электрогидравлического рулевого устройства
При гибкой передаче, которая получила название штуртросовой, усилие с рулевой машины на сектор передается при помощи цепи, стального гибкого троса или стального прутка. Цепь обычно ставят на участке, проходящем через звездочку рулевой машины, а на прямых участках — стальной трос или пруток. Для соединения отдельных участков штуртроса применяются замки, зажимы и талрепы. Чтобы изменить направление штуртроса, на криволинейных участках ставят направляющие блоки-роульсы, а для предохранения штуртроса от истирания о палубу — палубные катки.
В последнее время на судах находят все большее применение жесткие передачи — валиковые и шестеренчатые.
Валиковая передача (рис. 35) представляет собой систему жестких звеньев валиков, соединенных между собой универсальными шарнирами или коническими зубчатыми шестеренчатыми передачами.
Шестеренчатая передача представляет собой систему шестерен и валиков, при этом усилие рулевой машины передается на сектор руля с помощью червяка через шестерню.
На судах, имеющих два и более рулей, рулевой привод имеет более сложную конструкцию.
Рулевые машины по своей конструкции делятся на ручные, паровые, электрические и гидравлические.
Ручные рулевые машины просты по конструкции, поэтому их устанавливают на небольших судах (катерах) и на несамоходном флоте. Основными элементами ручных рулевых машин являются штурвальное колесо и связанный с ним барабан, на который наматывается цепь или трос (при штуртросной передаче). Если на судне применяется не штуртросная, а валиковая передача усилий от рулевой машины к рулю, то штурвальное колесо соединяется с шестеренчатым или червячным приводом, который механически связан с этой валиковой передачей.
Паровые рулевые машины ставятся на пароходах в качестве основных.
На большинстве современных теплоходов нашли применение электрические рулевые машины. Они устанавливаются в рулевой рубке или в румпельном отделении, находящемся в кормовом отсеке судна. Электродвигатель приводится в действие с пульта управления из рулевой рубки. Пульт управления имеет манипулятор. Поворотом рукоятки манипулятора вправо или влево включаются соответствующие контакты, и вал электродвигателя начинает вращаться в правую или в левую сторону, изменяя положение рулей судна. Если рули повернутся на тот или иной борт до своего крайнего положения, контакты размыкаются и электродвигатель автоматически выключается.
.jpg) Рис. 38. Схема гидравлического рулевого устройства теплохода "Метеор":
Рис. 38. Схема гидравлического рулевого устройства теплохода "Метеор":
1-цилиндр-исполнитель; 2-гидроусилитель; 3-штурвал; 4-цилиндр-датчик; 5-рулевая машина; 6-расходный бачок; 7-баллон с воздухом; 8-ручной аварийный насос; 9-гидронасос; 10-гидроаккумулятор
На заметку : Киевская Штурман проводит обучение вождению и повышение водительских навыков.
При установке электрических рулевых машин в обязательном порядке предусматривается резервный (запасной) ручной привод рулевого устройства. Чтобы не выполнять каких-либо переключений, при переходе на ручное управление применяют дифференциал Федорицкого.
Этот дифференциал (рис. 36) устроен и работает следующим образом. Червячные шестерни (колеса) 2 и 5 свободно вращаются на вертикальном валу 6. Внутренние торцовые поверхности этих червячных шестерен жестко связаны с коническими шестернями. На вертикальном валу при помощи шпоночного соединения закреплена крестовина 4, на конце которой свободно вращаются конические шестерни-сателлиты 3, связанные с коническими шестернями червячных колес 2 и 5. На верхний конец вала 6 посажена на шпонке цилиндрическая шестерня 7, входящая в зацепление с зубчатым сектором рулевого привода.
Червячный винт 9 вращается электродвигателем рулевого устройства. Червячный винт 8 связан с ручным запасным приводом и при работе электродвигателя неподвижен. Вследствие этого оказывается застопоренной червячная шестерня 5 с прикрепленной к ней снизу конической шестерней. Червячная шестерня 2 вращается винтом 9, а ее коническая верхняя шестерня заставляет вращаться шестерни-сателлиты 3. Но поскольку шестерня 5 застопорена, то шестерни 3 обегают по ее конической части, поворачивая крестовину 4, связанный с ней вал 6 и шестерню 7. Зубчатый сектор, соединенный шестерней 7, поворачивается.
При ручном управлении застопоренной оказывается червячная шестерня 2. Тогда при вращении червячного винта 9 шестерни-сателлиты обегают коническую шестерню червячного колеса 2, за счет чего происходит поворот вала 6.
Дифференциал Федорицкого является одновременно и регулятором, снижающим число оборотов вала 6 по сравнению с оборотами вала электродвигателя (т. е. червячного винта 9). Регулятор заключен в корпус 1.
Гидравлические рулевые машины, несмотря на целый ряд положительных качеств, получили на речном флоте меньшее распространение. Они устанавливаются главным образом на крупных и скоростных судах с подводными крыльями. Принцип их работы заключается в следующем (рис. 37): электродвигатель 1 приводит в действие насос 2, перекачивающий масло в правый 5 или левый 3 гидравлический цилиндр, в результате чего в цилиндрах перемещается поршень 6 и соединенный с ним румпель 4 рулевого привода, осуществляющий поворот рулей судна.
Гидравлический рулевой привод теплохода на подводных крыльях «Метеор» представлен на рис. 38. Он состоит из силовой системы и системы управления гидроусилителем.
В силовую (открытую) систему входят гидронасос с электроприводом, гидроусилитель, гидроаккумуляторы, расходный бак, фильтры, баллон с воздухом емкостью 8 л с давлением 150 кгс/см2, ручной аварийный насос, арматура и трубопроводы.
Система управления гидроусилителем (закрытая) состоит из цилиндров-датчиков, приводимых в действие от штурвала рулевой машины, цилиндров-исполнителей, заполнительного бачка, арматуры и трубопроводов.
В качестве рабочей жидкости в системе применяется авиационная смесь АМГ-10 (авиационное масло для гидравлики).
В рулевом приводе предусмотрено комбинирование ручного и гидравлического управления, что дает возможность в случае отказа гидравлического управления немедленно перейти на ручное.
Все крупные суда независимо от того, имеют ли они паровые, электрические или гидравлические машины, должны иметь запасное ручное управление. Время перехода с основного управления рулем на запасное не должно превышать 1 мин.
Усилие на рукоятке штурвала ручных рулевых приводов не должно превышать 12 кгс.
Продолжительность перекладки руля с борта на борт на самоходных судах с механическими или электрическими машинами не должна превышать 30 с, а с ручными — 1 мин. Аксиометр — механический или электрический прибор, служащий для указания угла отклонения пера руля. На новых судах аксиометр устанавливается на пульте управления.
Рулевые указатели конструктивно связаны только с головкой баллера руля, они показывают истинное положение руля независимо от работы рулевых приводов. Показание электрического рулевого указателя может быть выведено непосредственно в рулевую рубку судна.
Среди общепромышленных, употребляемых для учета продукции и сырья, распространены товарные, автомобильные, вагонные, вагонеточные и др. Технологические служат для взвешивания продукции в ходе производства при технологически непрерывных и периодических процессах. Лабораторные применяют для определения влажности материалов и полуфабрикатов, проведения физикохимического анализа сырья и других целей. Различают технические, образцовые, аналитические и микроаналитнческие .
Можно разделить на ряд типов в зависимости от физических явлений, на которых основан принцип их действия. Наиболее распространены приборы магнитоэлектрической, электромагнитной, электродинамической, ферродинамической и индукционной систем.
Схема прибора магнитоэлектрической системы показана на рис. 1.
Неподвижная часть состоит из магнита 6 и магнитопровода 4 с полюсными наконечниками 11 и 15, между которыми установлен строго центрированный стальной цилиндр 13. В зазоре между цилиндром и полюсными наконечниками, где сосредоточено равномерное радиально направленное , размещается рамка 12 из тонкой изолированной медной проволоки.
Рамка укреплена на двух осях с кернами 10 и 14, упирающихся в подпятники 1 и 8. Противодействующие пружины 9 и 17 служат токоподводами, соединяющими обмотку рамки с электрической схемой и входными зажимами прибора. На оси 4 укреплена стрелка 3 с балансными грузиками 16 и противодействующая пружина 17, соединенная с рычажком корректора 2.
01.04.2019
1.Принцип активной радиолокации.
2.Импульсная РЛС. Принцип работы.
3.Основные временные соотношения работы импульсной РЛС.
4.Виды ориентации РЛС.
5.Формирование развертки на ИКО РЛС.
6.Принцип функционирования индукционного лага.
7.Виды абсолютных лагов. Гидроакустический доплеровский лаг.
8.Регистратор данных рейса. Описание работы.
9.Назначение и принцип работы АИС.
10.Передаваемая и принимаемая информация АИС.
11.Организация радиосвязи в АИС.
12.Состав судовой аппаратуры АИС.
13.Структурная схема судовой АИС.
14.Принцип действия СНС GPS.
15.Сущность дифференциального режима GPS.
16.Источники ошибок в ГНСС.
17.Структурная схема приемника GPS.
18.Понятие об ECDIS.
19.Классификация ЭНК.
20.Назначение и свойства гироскопа.
21.Принцип работы гирокомпаса.
22.Принцип работы магнитного компаса.
Соединение кабелей — технологический процесс получения электрического соединения двух отрезков кабеля с восстановлением в месте соединения всех защитных и изоляционных оболочек кабеля и экранных оплеток.
Перед соединением кабелей измеряют сопротивление изоляции . У неэкранированных кабелей для удобства измерений один вывод мегаомметра поочередно подключают к каждой жиле, а второй — к соединённым между собой остальным жилам. Сопротивление изоляции каждой экранированной жилы измеряют при подключении выводов к жиле и ее экрану. , полученное в результате измерений, должно быть не менее нормированного значения, установленного для данной марки кабеля.
Измерив сопротивление изоляции, переходят к установлению или нумерации жил, или направлений повива, которые указывают стрелками на временно закрепленных бирках (рис. 1).
Закончив подготовительные работы, можно приступать к разделке кабелей. Геометрию разделки соединений концов кабелей видоизменяют в целях обеспечения удобства восстановления изоляции жил и оболочки, а для многожильных кабелей также для получения приемлемых размеров места соединения кабелей.
МЕТОДИЧЕСКОЕ ПОСОБИЕ К ПРАКТИЧЕСКОЙ РАБОТЕ: «ЭКСПЛУАТАЦИЯ СИСТЕМ ОХЛАЖДЕНИЯ СЭУ»
ПО ДИСЦИПЛИНЕ: «ЭКСПЛУАТАЦИЯ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК И БЕЗОПАСНОЕ НЕСЕНИЕ ВАХТЫ В МАШИННОМ ОТДЕЛЕНИИ »
ЭКСПЛУАТАЦИЯ СИСТЕМЫ ОХЛАЖДЕНИЯ
Назначение системы охлаждения:
- отвод теплоты от ГД;
- отвод теплоты от вспомогательного оборудования;
- подвод теплоты к ОУ и другому оборудованию (ГД перед пуском, ВДГ поддержание в "горячем" резерве и т.д.);
- прием и фильтрация забортной воды;
- продувание кингстонных ящиков летом от забивания медузами, водорослями, грязью, зимой - ото льда;
- обеспечение работы ледовых ящиков и др.
 Рулевое устройство
совокупность механизмов, агрегатов и узлов, обеспечивающих управление судном.
Рулевое устройство
совокупность механизмов, агрегатов и узлов, обеспечивающих управление судном.
Основными конструктивными элементами любого рулевого устройства являются:
рабочий орган - перо руля (руль) или поворотная направляющая насадка;
баллер, соединяющий рабочий орган с рулевым приводом;
рулевой привод, передающий усилие от рулевой машины к рабочему органу;
рулевая машина, создающая усилие для поворота рабочего органа;
привод управления, связывающий рулевую машину с постом управления.
На современных судах устанавливают пустотелые обтекаемые рули, состоящие из горизонтальных ребер и вертикальных диафрагм, покрытых стальной обшивкой (рис. 1, а). Обшивку крепят к раме электрозаклепками. Внутреннее пространство руля заполняют смолистыми веществами или самовспенивающимся пенополиуретаном ППУ3С.
В зависимости от расположения оси вращения различают балансирные (рис. 1, д, в), небалансирные (рис. 1, б) и полубалансирные рули . Ось вращения балансирного руля проходит через перо руля, а небалансирного - совпадает с передней кромкой пера. У полубалансирного руля в нос от оси вращения выступает только нижняя часть пера. Момент сопротивления повороту балгнсирного или полубалансирного руля меньше, чем небалансирного, и соответственно меньше требуемая мощность рулевой машины.
По способу крепления рули разделяют на подвесные и простые.
Подвесной руль крепят горизонтальным фланцевым соединением к баллеру и устанавливают только на малых и малых маломерных добывающих судах.Простой одноопорный балансирный руль (см. рис. 1, а) штырем упирается в упорный стакан пятки ахтерштевня. Для уменьшения трения цилиндрическая часть штыря имеет бронзовую облицовку, а в пятку ахтерштевня вставлена бронзовая втулка. Соединение руля с баллером - горизонтальное фланцевое на шести болтах или конусное. При конусном соединении коническая концевая часть баллера вставляется в конусное отверстие верхней торцевой диафрагмы руля и плотно затягивается гайкой, доступ к которой обеспечивается через крышку, поставленную на винтах, входящих в обшивку руля. Изогнутый баллер дает возможность раздельного демонтажа руля и баллера (при их взаимном развороте).
Простой двухопорный небалансирный руль (см. рис. 1, б) сверху закрыт листовой диафрагмой и литой головкой, имеющей фланец для соединения руля с баллером и петлю под верхнюю штыревую опору. В петлю рудерпоста вставляют бакаутовые, бронзовые или другие втулки.
Недостаточная жесткость нижней опоры балансирных рулей часто становится причиной вибрации кормы судна и руля. Этот недостаток отсутствует у балансирного руля со съемным рудерпостом (см. рис. 1, в). В перо такого руля вмонтирована труба, через которую проходит съемный рудерпост. Нижний конец рудерпоста закрепляют конусом в пятке ахтерштевня, а верхний крепят фланцем к ахтерштевню. Внутри трубы устанавливают подшипники. Рудерпост в местах прохождения через подшипники имеет бронзовую облицовку. Крепление руля к баллеру - фланцевое.
Рис. 1. Рабочие органы рулевых устройств: а - руль одноопорный балансирный; б - руль двухопорный небалансирный; в - руль баланснрный со съемным рудерпостом; г - активный руль; д - поворотная направляющая насадка со стабилизатором; 1 - баллер; 2 - фланец; 3 - обшивка пера руля; 4 - наделка-обтекатель; 5 - вертикальная диафрагма; 6 - горизонтальное ребро; 7 - пятка ахтерштевня; 8 - гайка; 9 - шайба; 10 - рулевой штырь; 11 - бронзовая облицовка штыря; 12 - бронзовая втулка (подшипник); 13 - упорный стакан; 14 - канал для демонтажа упорного стакана; 15 - гельмпортовая труба; 16 - петля рудерпоста; 17 - рудерпост; 18 - бакаут; 19 - фланец рудерпоста; 20 - съемный рудерпост; 21 - вертикальная труба; 22 - гребной винт руля; 23 - редуктор с обтекателем; 24 - стабилизатор; 25 - поворотная направляющая насадка; 26 - гребной вал; 27 - гребной винт





В пере активного руля (рис. 1, г) помещен вспомогательный гребной винт . При перекладке руля направление упора вспомогательного винта изменяется и возникает дополнительный момент, поворачивающий судно. Направление вращения вспомогательного винта противоположно направлению вращения основного. Электродвигатель размещается в пере руля или в румпельном отделении. В последнем случае электродвигатель непосредственно соединен с вертикальным валом, передающим вращение редуктору движителя. Винт активного руля может обеспечить судну скорость до 5 уз.
На многих судах промыслового флота вместо руля устанавливают поворотную направляющую насадку (рис. 1, д), которая создает такую же, как и руль, боковую силу при меньших углах перекладки. Причем момент на баллере насадки примерно в два раза меньше момента на баллере руля. Для обеспечения устойчивого положения насадки при перекладках и увеличения ее рулевого действия к хвостовой части насадки в плоскости оси баллера крепят стабилизатор. Конструкция и крепление насадки аналогичны конструкции и креплению балансирного руля.
Баллер - изогнутый или прямой стальной цилиндрический брус, выведенный через гельмпортовую трубу в румпельное отделение. Соединение гельмпортовой трубы с наружной обшивкой и настилом палубы - водонепроницаемое. В верхней части трубы устанавливают уплотнительный сальник и подшипники баллера, которые могут быть опорными и упорными.
Рулевое устройство должно иметь приводы: главный и вспомогательный, а при их расположении ниже грузовой ватерлинии дополнительный аварийный, размещенный выше палубы переборок. Вместо вспомогательного привода допускается установка сдвоенного главного, состоящего из двух автономных агрегатов. Все приводы должны действовать независимо друг от друга, но, как исключение, допускается наличие у них некоторых общих деталей. Главный привод должен работать от источников энергии, вспомогательный может быть ручным.
Конструкция привода руля зависит от типа рулевой машины. На судах промыслового флота устанавливают электрические и электрогидравлические рулевые машины. Первые выполняют в виде электродвигателя постоянного тока, вторые - в виде комплекса электродвигатель - насос в сочетании с плунжерным, лопастным или винтовым гидравлическим приводом. Ручные рулевые машины в сочетании с штуртросовым, валиковым или гидравлическим рулевым приводом встречаются только на малых и маломерных добывающих судах.
Рис. 2. Приводы руля: а - секторно-эубчатый; б - штуртросовый; в - гидравлический плунжерный; г - гидравлический лопастный; д - гидравлический винтовой; е - румпель-таль; 1 - штурвал и рулевая колонка вспомогательного привода; 2 - румпель; 3 - червячный редуктор; 4 - зубчатый сектор главного привода; 5 - электродвигатель; 6 - пружинный амортизатор; 7 - баллер; 8 - балансирный руль; 9 - зубчатый сектор вспомогательного привода; 10 - червяк; 11 - штуртрос; 12 - направляющие роульсы; 13 - буферные пружины; 14 - сектор; 15 - поршень-плунжер; 16 - гидроцилиндр; 17 - насос; 18 - предохранительный клапан; 19 - корпус; 20 - секторовидная камера; 21 - крылатка с лопастями; 22 - стакан с продольными канавками; 23 - кольцевой поршень; 24 - стакан с винтовыми канавками; 25 - крышка; 26 - квадратная головка; 27 - рабочая полость цилиндра; 28 - шпоночная канавка; 29 - ходовой конец лопаря; 30 - подвижный блок; 31 - неподвижный блок






На многих мало и среднетоннажных судах устанавливают секторнозубчатый рулевой привод (рис. 2, а). При работе электродвигателя свободно насаженный на баллер зубчатый сектор через пружинные амортизаторы передает усилие жестко закрепленному на баллере продольному румпелю. Амортизаторы смягчают толчки, возникающие при пуске электродвигателя или при ударах волн о перо руля. Червячный редуктор обеспечивает самоторможение привода. В качестве вспомогательного привода предусмотрен дополнительный жестко насаженный на баллер зубчатый сектор. Работу сектора обеспечивает ручная штурвальная колонка через валиковую проводку и дополнительный червячный редуктор.
На маломерных добывающих судах применяют секторный штуртросовый привод (рис. 2, б). Усилие рулевой машины через штуртрос передается жестко насаженному на баллер сектору. Штуртрос выполняют иэ стального троса с участком цепи Галля в средней части или целиком из цепи. Обе ветви штуртроса от сектора через направляющие роульсы идут к звездочке или барабану рулевой машины. В последнем варианте при вращении барабана одна ветвь стального троса выбирается, а другая - потравливается. Слабину штуртроса выбирают винтовыми талрепами, толчки смягчаются буферными пружинами.
Наибольшее распространение на промысловом флоте получили гидравлические рулевые приводы: плунжерный, лопастный, винтовой.
Насос гидравлического плунжерного привода (рис. 2, в) при работе электродвигателя перекачивает рабочую жидкость из одного гидроцилиндра в другой, что приводит к перемещению шарнирно соединенного с жестко насаженным на баллер румпелем плунжера и повороту баллера. При ударе волны о перо руля давление в одном из гидроцилиндров возрастает и предохранительный клапан перепускает часть рабочей жидкости в другой цилиндр, амортизируя удар. Специальное устройство обеспечивает автоматический возврат пера руля в первоначальное положение после спада давления в гидроцилиндре. На многих судах установлены сдвоенные плунжерные гидравлические рулевые приводы. Параллельно работающие две пары гидроцилиндров и два насоса обеспечивают возможность перекладки руля любой парой гидронасосов. В этом случае на судне может отсутствовать вспомогательный привод руля.
Румпель гидравлического лопастного рулевого привода, выполненный в виде крылатки с лопастями, находится в закрытом цилиндрическом корпусе, разделенном неподвижными перегородками на несколько рабочих камер, заполненных рабочей жидкостью (на рис. 2, г две камеры). Зазоры между лопастями и корпусом, неподвижными перегородками и баллером уплотняются. При перекачке рабочей жидкости из одних полостей камер в другие создается разность давлений, вызывающая поворот румпеля и баллера.
Винтовой гидравлический привод (рис. 2, д) состоит из неподвижного корпуса, средняя часть которого выполняет роль цилиндра. В цилиндр помещен кольцевой поршень: его внутренняя поверхность имеет в верхней части винтовые, а в нижней - продольные канавки. На головку баллера жестко надет стакан с продольными канавками. Другой стакан с винтовыми канавками неподвижно прикреплен к крышке корпуса. При подаче жидкости в рабочую полость цилиндра поршень получает поступательное движение, перемещаясь по винтовым канавкам неподвижного стакана, поворачивается и через стакан с продольными канавками поворачивает баллер.
Кроме перечисленных на промысловых судах изредка встречаются рулевые приводы других типов, в основном в качестве вспомогательных или аварийных. В исключительных аварийных ситуациях могут быть применены две румпельтали.
Таль - это два блока, между которыми натянут трос (лопарь, рис. 2, е). Конец лопаря, за который производят тягу, называют ходовым , а закрепленный конец - коренным . Блок состоит из корпуса, внутри которого находятся один или несколько шкивов, вращающихся на оси (нагеле). Тали могут быть различной конструкции. Наиболее простым видом тали является гордень неподвижный одношкивный блок, позволяющий изменить направление тяги (направляющий блок). Гордень не дает выигрыша в усилии.
Другой вид - хваттали это двух и одношкивные блоки, причем коренной конец лопаря закреплен на одношкивном блоке.
Тали, состоящие из блоков с одинаковым числом шкивов, называют ганцами , а из блоков с числом шкивов более трех в каждом блоке - гинями . При работе тали во всех ветвях лопаря возникает усилие, равное усилию, приложенному к ходовому концу, поэтому общее усилие, передаваемое талью, равно сумме усилий в ветвях подвижного блока, включая усилие и в ходовом конце, если он сходит с этого блока. Один блок тали скобой крепят к предусмотренному в шпангоуте отверстию, другой - к сектору или румпелю. Ходовые лопари через систему направляющих блоков выводят к ближайшей лебедке. Принцип работы аналогичен работе штуртросового привода .
Дистанционное управление рулевой машиной из рулевой рубки обеспечивают телединамические передачи, называемые рулевыми телепередачами или рулевыми телемоторами. На современных промысловых судах нашли применение гидравлические и электрические рулевые телепередачи. Часто они дублируются или комбинируются в электрогидравлические.
Электрическая телепередача состоит из специального контроллера, расположенного в рулевой тумбе и связанного электрической системой с пусковым устройством рулевой машины. Управление контроллером осуществляется с помощью штурвала, рукоятки или кнопки.
Гидравлическая телепередача состоит из ручного насоса, приводимого в работу штурвалом, и системы трубок, связывающих насос с пусковым устройством рулевой машины. Рабочей жидкостью системы служат незамерзающая смесь воды с глицерином или минеральное масло.
Управление главным и вспомогательным рулевыми приводами (работающими от источника энергии) - независимо и производится с ходового мостика, а также из румпельного отделения. Время перехода с главного на вспомогательный привод не должно превышать 2 мин. При наличии постов управления главным рулевым приводом в рулевой и промысловой рубках выход из строя системы управления с одного поста не должен препятствовать управлению с другого поста. Время перекладки полностью погруженного руля или поворотной насадки главным приводом (при наибольшей скорости переднего хода) с 35° одного борта на 30° другого не должно превышать 28 с, вспомогательным (при скорости, равной половине наибольшей скорости переднего хода или 7 уз, в зависимости от того, какое значение больше) с 15° одного борта на 15° другого - 60 с, аварийным (при скорости не менее 4 уз) не ограничивается.
Угол,перекладки руля определяют по установленному у каждого поста управления аксиометру. Кроме того, на секторе рулевого привода или других деталях, жестко связанных с баллером, наносят шкалу для определения действительного положения руля. Автоматическую согласованность между скоростью, направлением вращения и положением штурвала и скоростью, стороной и углом перекладки руля обеспечивает сервомотор.
Ограничители перекладки руля выполняют в виде выступов на пере руля и ахтерштевне, которые упираются друг в друга при максимально допускаемом угле перекладки руля, или в виде книц, приваренных к палубе, в которые упирается сектор привода руля. Все механические рулевые приводы дополнительно имеют конечные выключатели, отключающие механизмы прежде, чем руль дойдет до ограничителя поворота. В гидравлическом плунжерном приводе ограничителем поворота руля служат донышки гидроцилиндров привода.
Тормоз (стопор) руля предназначен для удержания руля при аварийном ремонте или при переходе с одного привода на другой. Наиболее часто применяют ленточный стопор, зажимающий непосредственно баллер руля. Секторные приводы имеют колодочные стопоры, в которых тормозная колодка прижимается к специальной дуге на секторе. В гидравлических приводах роль стопора выполняют клапаны, перекрывающие доступ рабочей жидкости к приводам.
Удержание судна на заданном курсе при благоприятных погодных условиях без участия рулевого обеспечивает авторулевой, принцип работы которого основан на применении гирокомпаса или магнитного компаса. Органы обычного управления связаны с авторулевым. Когда судно ложится на заданный курс, руль по аксиометру устанавливают в нулевое положение и включают авторулевой. Если под действием ветра, волнения или течения судно отклоняется от заданного курса, электродвигатель системы, получив импульс от датчика компаса, обеспечивает возвращение судна на заданный курс. При изменении курса или маневрировании авторулевой отключают и переходят на обычное рулевое управление.